
在激光扫描点云中自动提取平面、球体、圆柱体、锥体和环面等三维几何形状是一个具有挑战性的问题,也是一个繁琐的过程,特别是在使用杂乱的数据时。
目前现有激光扫描点云的方法具有过大的空间和时间复杂性或产生不精确的结果等问题。所以人们1基于Hough变换的点云柱面参数自动检测方法,使用基于面积的自适应方法修改了方向估计,形成了一种基于点云的3D管道自适应重建与模方法。
该方法利用小型累加器在点云数据中存在单个或多个圆柱体时检测霍夫空间中的显著峰值,能通过减少空间和时间来提高计算复杂度,并产生了可用于三维管道模型自动化重建的方法。
方法形成的背景
激光扫描点云数据中几何目标的自动提取是近年来三维重建领域的一个研究热点,许多应用程序需要从激光扫描数据中提取对象的3D模型,包括工业厂房设计、逆向工程和3D可视化。
涉及监控、翻新和维护的项目也经常需要从激光扫描数据中提取物体的3D模型。
工业场景中的设备对象大多由平面、球体、圆柱体、锥体、环面等基本几何基元组成,已建成的三维管道采用圆柱体进行设计,这是工业厂房(如石化和炼油厂)重建中最常见的几何原始对象。
目前,有许多方法将激光扫描点云数据参数化并拟合圆柱体。然而,重建一个完全自动化的3D建成管道模型是一个公开的挑战,因为这个过程通常是费力的。

并且在工业厂房设计领域,从激光扫描点云中自动检测和重建三维模型需要高度精确和明确。
工业厂房由各种各样的连接设备组成,它们之间的关系可以从管道连接网络中确定。例如,直管(包括t形接头和弯头接头)与法兰之间可能存在多种连接关系,这种连接关系表示管道设备中最近的相邻元件之间的逻辑连通性。
在三维点云数据中检测几何形状的两种基本的、众所周知的方法是霍夫变换和随机样本共识(RANSAC)方法。基于RANSAC方法的方法通过随机采样来处理原始点云,这种方法需要最少数量的数据点来检测形状。
然而,用户需要设置几个阈值,这些阈值因模型而异,特别是当存在带有异常值的噪声数据时,这种精确检测三维形状(平面、球体、圆柱体等)的方法依赖于点的初始选择。
另一种检测几何形状的方法是使用积累技术,如霍夫变换,因为基于霍夫变换的方法已经被成功地用于检测激光扫描点云数据中的圆柱体、平面和球体。
因为转换方法的运行时间通常比RANSAC快,Hough变换在参数空间中进行投票过程,当获得最多票数时获得候选对象。霍夫变换找到圆柱体分为两步,第一步估计圆柱轴方向,而第二步使用从第一步估计的方向估计位置和半径。
虽然霍夫变换可以用来检测激光扫描点云数据中的圆柱体,但限制较多,所以需要一种自适应的方法来同时检测激光扫描点云数据中的圆柱体参数和估计多个圆柱体的方向。
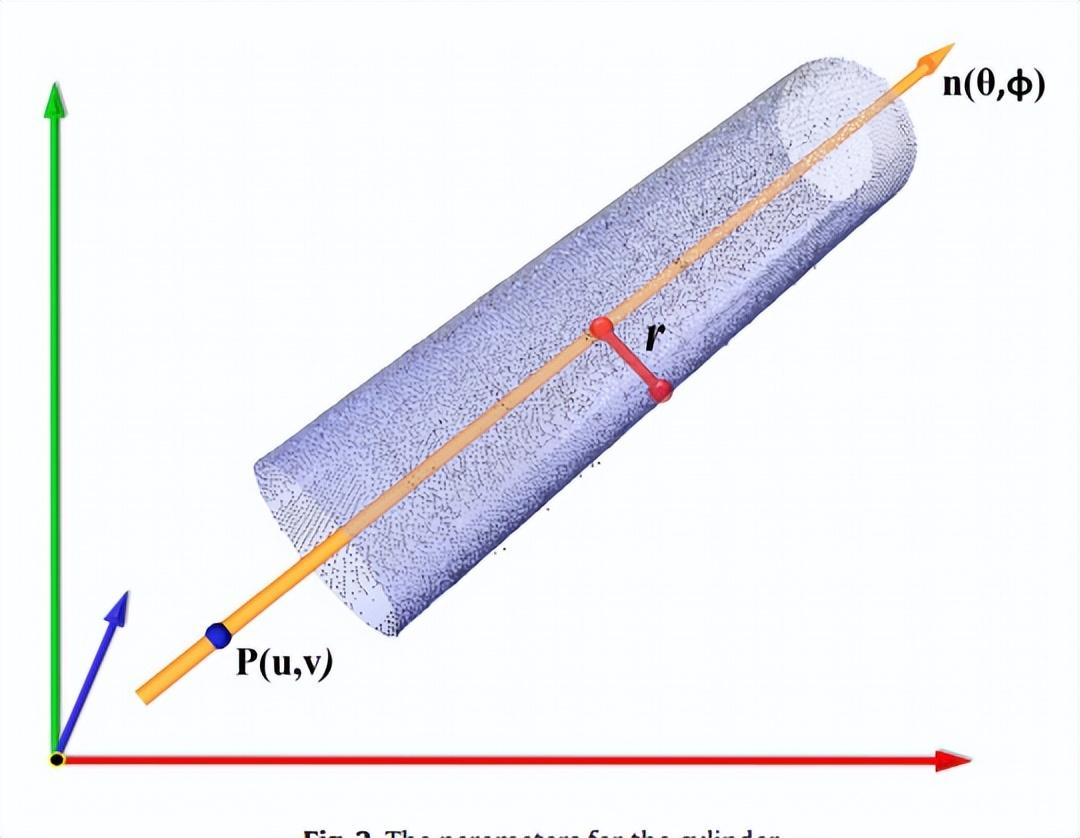
基于点云的3D管道自适应重建与模方法利用球坐标将参数从7个减少到5个。圆柱体由5个参数表示:(θ, φ)为球坐标中的方向,r为半径,P (u, v)为方向轴上的一个点。
方法基于区域的自适应霍夫变换估计柱面方向,利用一种基于区域的自适应方法检测高斯球的万向,同时估计多个圆柱体的方向,对现有方法的改进,采用代数圆拟合算法对圆柱位置和半径估计采用最小的计算步数,通过寻找管道之间的连接关系来重建管网。
固有方法的演变和新方法出现的时机
在数字图像处理领域,经典的霍夫变换技术通常使用图像中直线的参数化表示来检测二维直线,该技术最常用于检测二维图像中的直线、圆和椭圆。
随着对三维点云重建和建模研究的增加,对三维几何物体的检测需求也随之增加。在这种情况下,经典的二维霍夫变换已经扩展到三维几何对象的提取,如平面、球体和圆柱体。
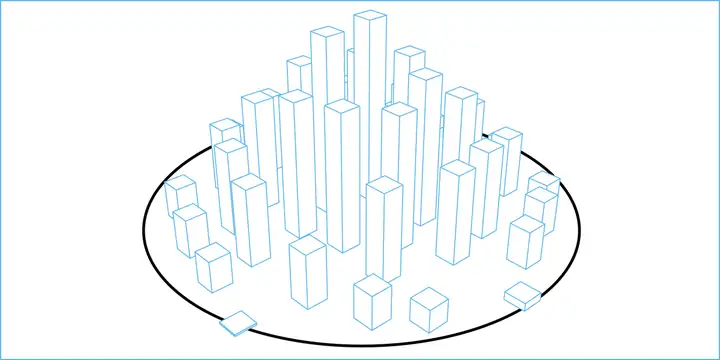
对于任何给定的输入点云数据,霍夫变换对输入点云中的每个点进行投票,以检测哪些点可能包含任何几何对象。将所有样本的选票累积起来,检测到的特征对应于得票最多的特征。
该算法的时间和空间复杂性都取决于累加器所使用的离散化,其中累加器的维数随用于描述待检测特征的参数数量而变化。
例如,圆柱体检测需要一个用于方向的2D累加器和一个用于位置和半径的3D累加器,以表示描述圆柱体方向、位置和半径的五个参数。
另一项重要的3D物体检测技术是RANSAC方法。
它通过随机选择点,计算由这些点定义的对象,并计算在某个容差阈值内该对象上有多少个点来迭代地进行对象检测。找到的点数称为该对象的分数。算法在达到稳定状态时停止,因为找到得分高于前几次的对象的概率很低。
目前部分研究将高斯球与随机抽样方法(RANSAC)相结合,提取柱体并估计其参数,该方法将圆柱体的提取分为两个步骤:
首先,利用高斯图像计算圆柱体的方向,然后提取圆柱体,然后采用随机抽样的方法提取圆柱体的大小和位置。还有使用在管道工厂的大尺度点云中检测了圆柱体。然而,这种方法只支持提取垂直或平行于地面的管道。
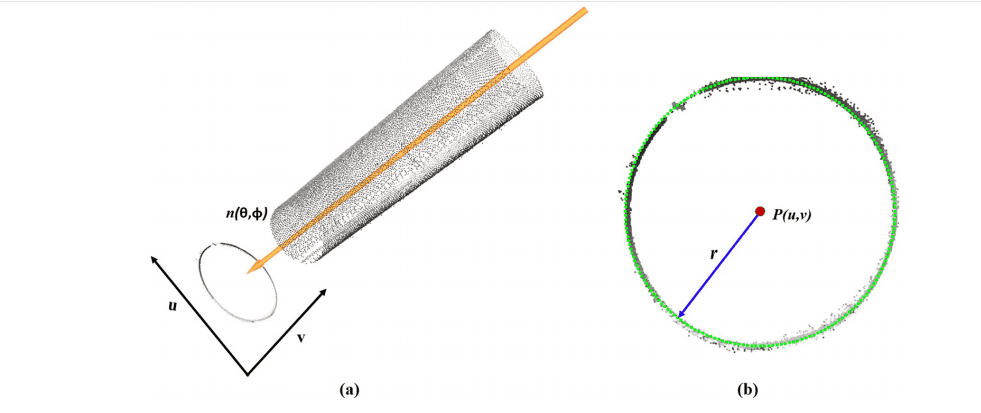
所以有研究提出了一种基于二维的Hough变换,通过将点投影到正交平面上,从三维点云中识别和重建管道,从而检测噪声数据中的参数形状。
与管道相关的点数据在平面切片上以圆形排列方式创建。然后在三维空间中组合圆形截面以获得完整的直管建成模型,并且仅限于平行于正交轴的管道。
还有一种利用植物先验CAD模型将优化后的圆柱体模型拟合到扫描点的方法。但是这种方法对于具有相似半径和轴向的3D圆柱体模型必须手动放置在管道上的点附近。
相关研究出一种分三步从大尺度点云中自动提取和重建管道的方法。
首先,利用高斯球的全局相似度获取方法提取柱体方向。
第二步,通过平面上的点映射和圆检测来发现柱体位置。
最后,对关节进行检测和建模,恢复连接信息,实现气缸的平滑连接。
结合时代,人们还研发出一种自动化方法,该方法采用基于法向的区域生长方法,去除管道以外的点,对管道类型进行分类(直管、弯头、t型结),并获得它们之间的连接关系,从而自动重建整个三维点云。
有研究还提出了一种利用管道装置激光扫描数据检测和重建柱面的方法。首先,根据扫描点云自动生成部分光滑网格模型,然后根据扫描仪反射强度手动包含网格模型中缺失的部分。
除上述方法外,还有一种从三维点云自动重建已建成管道模型的方法,利用拓扑细化的方法从候选骨架中提取骨架。提取的骨架被分割成单独的组件,并计算每个组件的一组参数。
目前人们提出的方法是修改了关于气缸参数自动检测的工作启发的变换方法,优化圆柱体检测问题。
例如利用球坐标将参数数量从7个减少到5个。它们包括两个用于球坐标的轴方向参数,一个用于圆柱体半径的参数,以及两个用于局部坐标系中起点和终点位置的参数。
这两个步骤是:(1)构造一个二维hough -空间问题来寻找柱体轴线方向的强假设;(2)构造一个三维hough -空间问题,利用在第一阶段找到的几个相邻方向作为求柱体位置和半径的方法。
最近,人们对之前的方法再次进行了改进,采用从粗到精的方法来减少方向估计的运行时间,并进一步采用聚类算法对多圆柱体进行鲁棒估计。
对于粗-精方法,分析了原始的方向估计步骤,发现高斯球上的细胞数会影响方向估计的精度。单元数越多,方向估计越准确,但增加了计算时间和空间。
另一方面,较少的单元格数量会产生较不准确的方向结果,但需要较少的计算时间和空间。在此条件下,作者在一条圆形曲线上迭代地减小高斯球上的搜索区域,直到达到停止准则。在这种方法中,迭代方向估计主要依赖于输入点云的大小。
一个小的输入点云需要较少的迭代,而一个大的输入点云需要更多的迭代来找到方向。对于需要多柱面估计的任务,在累加器上实现了聚类技术。
首先,丢弃累加器中具有少量累加的单元格,以便于分层树的计算。然后应用聚类将剩余的单元分组到代表不同圆柱体的簇中。然而,在输入点云数据中存在多个圆柱体时,没有发现具有相似方向方向的圆柱体。
方法的概述
基于点云的3D管道自适应重建与模方法是一种开发自动化系统的方法,该系统可以根据激光扫描数据重建整个已建成的3D管道模型,该模型由一系列由弯头接头和t形接头连接的直管组成,代表了一项重大进步的方法,但仅限于直管的重建。
在该方法中,分为降低时间和空间复杂度两个阶段。在第一阶段,用高斯球上较少的单元估计圆柱体的初始方向。接下来,算法在高斯球上找到初始方向单元及其相邻单元,以限制下一阶段的面积。
在第二阶段,细胞密度仅在高斯球上的限制区域内增加,以估计准确的圆柱体方向。通过这两个方向估计步骤,基于区域的自适应方法确定了降低的时间和空间复杂度。
基于点云的3D管道自适应重建与模方法主要是对顺序Hough变换方法进行了改进,实现了点云中柱体的自动检测。
所实现的基于区域的自适应霍夫变换可以减少计算的时间和空间,提高了柱面方向估计的精度,通用方向获取进一步提高了c段点云中存在多个圆柱体时圆柱体特征检测的鲁棒性。

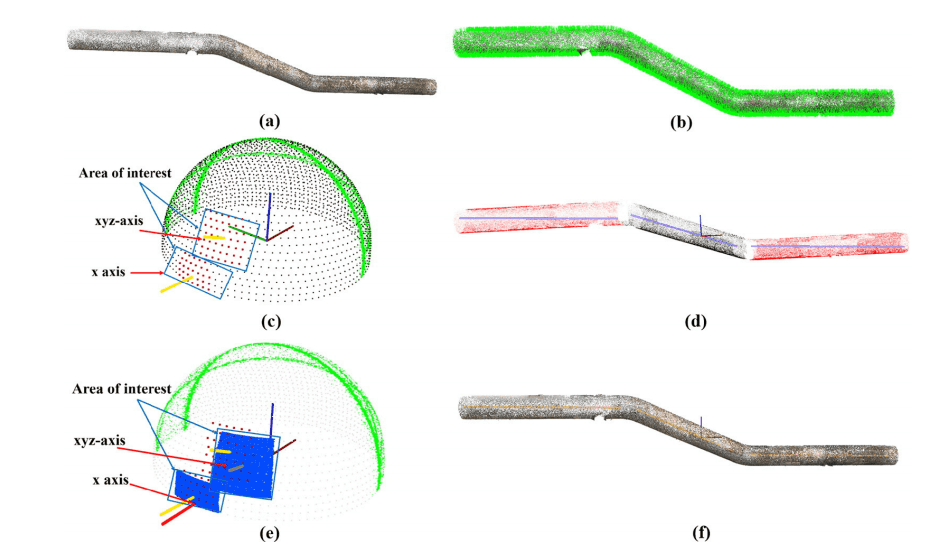
将提出的基于区域的自适应霍夫变换圆柱检测方法应用于实际实验数据,对其性能和精度进行了评价。将上述概述的方法应用于不同的工业现场点云数据集,结果如上图所示。
作为更真实的重建实验,从大型工业数据集中选取一组c段自适应检测圆柱体参数,并找出检测到的各个圆柱体之间的连接关系。
该方法采用代数圆拟合算法,减少了计算步数,对现有圆柱位置和半径估计方法进行了改进,并且通过寻找气缸之间的连接关系来重建管道网络,可以根据c段中检测到的气缸的相关参数进行分类。
将检测到的气缸参数和连接关系保存,形成规范数据文件。利用SP3D自动化程序中的SQL数据库和目录表,利用SP3D软件成功地重建和组装了一个三维成品管道模型。
该方法对圆柱体的自动检测精度高,且与输入的激光扫描点云数据一致。在实际植物的大规模点云中验证了柱体重构的时空复杂度和精度,实现了时间和空间计算成本的大幅度提高。
未来的研究可以集中在扩展和增强基于区域的自适应霍夫变换方法,以检测激光扫描点云中的其他几何物体,如平面、球体、锥体和环面。
考虑到圆柱体检测的静态特性,在估计初始方向后,通过优化分组相似方向圆柱体的内层点云提取,提高圆柱体检测的精度和数量。
与原始方法相比,基于点云的3D管道自适应重建与模方法基于面积的方法检测到的圆柱体cD结果平均下降了4.6%,但检测到的真圆柱体cT平均增加了4.2%,假圆柱体cF平均下降了4.2%。
这两个cT和cF计数结果在我们的病例中是有利的,最好是采用原始方法。
综合评价,方法在准确率和召回率上的提升不显著,但在降低错误率方面有显著提高。因此,基于点云的3D管道自适应重建与模方所提出的圆柱检测方法在时间和空间复杂度方面具有快速、自适应和线性的特点。
但基于点云的3D管道自适应重建与模方法并不是完美的,所以未来对于改善的工作可以通过进一步研究高效的自适应算法来加强和改进预处理步骤,并将重点放在提取和重建激光扫描点云数据中包含的最小半径圆柱体上。
参考文献:Patil, A. K., Holi, P., Lee, S. K., & Chai, Y. H. (2017). An adaptive approach for the reconstruction and modeling of as-built 3D pipelines from point clouds.Automation in Construction, 75, 65–78.
doi:10.1016/j.autcon.2016.12.002
10.1016/j.autcon.2016.12.002元气















暂无评论内容